






机器人视觉是使机器人具有视觉感知功能的系统,机器人视觉可以通过视觉传感器获取环境的一维、二维和三维图像,并通过视觉处理器进行分析和解释,进而转换为符号,让机器人能够辨识物体,并确认物体位置及各种状态。
机器人视觉的基本原理:
通过对摄像机拍摄到的图像进行图像处理,来计算对象物的特征量(面积、重心、长度、位置等),并输出数据和判断结果的传感器。在捕获图像之后,视觉传感器将其与内存中存储的基准图像进行比较,分析,例如,若视觉传感器被设定为辨别正确地插有八颗螺栓的机器部件,则传感器知道应该拒收只有七颗螺栓的部件,或者螺栓未对准的部件,此外,无论该机器部件位于视场中的哪个位置,无论该部件是否在360度范围内旋转,视觉传感器都能做出判断。
机器视觉的常见应用领域:
(1)定位:现在定位比较多的视觉功能,通常安装在机器手上,由视觉拍到产品位置,再讲视觉上的坐标位置转到机器手坐标系中的位置,然后机器手在对产品进行加工。
(2)测量:使用机器视觉进行无接触式测量准确测量,特别对于特殊要求的工作场景。
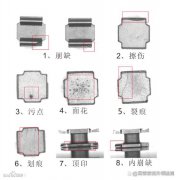
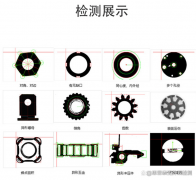
(3)检测:检测是机器视觉工业领域最主要的应用之一, 对产品进行缺陷检测,比如印刷检测缺省多余,产品上是否有毛刺,产品是否混料,产品上是否有赃物划痕等等。
(4)识别: 进行一维码,二维码,光学字符识别等。
(5)分拣:实际上,物体分拣应用是建立在识别、检测之后一个环节,通过机器视觉系统将图像进行处理,实现分拣。在机器视觉工业应用中常用于食品分拣、零件外貌瑕疵自动分拣、棉花纤维分拣等。
机器视觉系统最基本的特点就是提高生产的灵活性和自动化程度。在一些不适于人工作业的危险工作环境或者人工视觉难以满足要求的场合,常用机器视觉来替代人工视觉。同时,在大批量重复性工业生产过程中,用机器视觉检测方法可以大大提高生产的效率和自动化程度。
联系我时,请说是在东莞机械网看到的,谢谢!







 未上传身份证认证
未上传身份证认证  未上传营业执照认证
未上传营业执照认证 




